|
|
|
|
Safety_Critical_Machine_Learning |
|



|
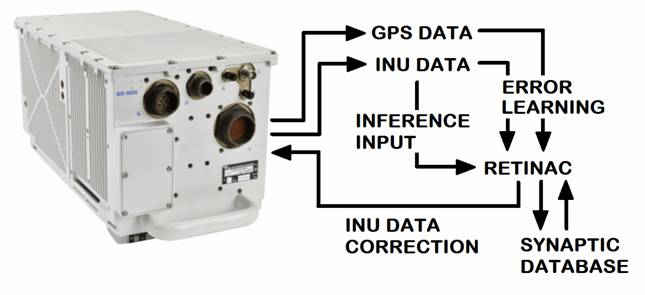
In the picture
above SIGMA95® Inertial Navigation Unit by SAFRAN® |

|
REal Time Inertial Navigation Adaptive Correction (RETINAC™) - Inertial navigation
is a self-contained navigation technique in which measurements provided by accelerometers
and gyroscopes are used to track the position and orientation of an object
relative to a known starting point, orientation and velocity. A major
disadvantage of using INUs (Inertial Navigation Units) for navigation is that
they typically suffer from accumulated error. Because the guidance system is
continually integrating acceleration with respect to time to calculate
velocity and position, any
measurement errors, however small, are accumulated over time. This leads to
'drift' that is an ever-increasing difference between where the system thinks
it is located and the actual location. Due to integration a constant error in
acceleration results in a linear error growth in velocity and a quadratic
error growth in position. A constant error in attitude rate (gyro) results in
a quadratic error growth in velocity and a cubic error growth in position. There are currently
navigation systems that integrate GPS/GLONASS and INU navigation systems so
that INU only operates when GPS/GLONASS signals are not available. A
state-of-the-art INU like SIGMA95® from SAFRAN® has very high levels of
precision and reliability. However, there is still an INU accuracy problem
when this situation continues for too long a time. There is also the
possibility that the INU error is not systematic and may vary due to the
different acceleration sequences in the three axes and also due to
unavoidable variations in the operation of the device over time. The RETINAC™ system
adaptively and continuously adjusts the accuracy of INU through Machine
Learning algorithms that operate in real time by comparing GPS/GLONASS and
INU information for tens of thousands of acceleration patterns. When
GPS/GLONASS is running, the MYTHOS™ adaptive machine learning algorithm
continuously learns the errors generated by INU for specific acceleration
sequences. When the GPS/GLONASS signal is not available, the MYTHOS algorithm
operates in inference by correcting the positioning data coming from the INU. |
|
|
|
General Synaptics Aerospace_and_Defence_Machine_Learning_Company VAT NUMBER:_IT02670700992 REA NUMBER: GE-503104 Email:_luca.marchese@synaptics.org |
|
|
|
Copyright© 2026 General Synaptics |